A unified six-DoF model for the CUSV
“For the purposes of supporting the development of autonomy, it is important that the unified simulation model include both manoeuvring and seakeeping degrees-of-freedom. The manoeuvring aspects of the model influence the vessel steering and control portion of the autonomy solution. The inclusion of the seakeeping aspect of the model is critical for exercising the sensory perception portion of the autonomy solution.”
The note collects a self-consistent set of parameters for a six-degree-of-freedom marine-craft model adapted from Fossen’s Handbook of Marine Craft Hydrodynamics and Motion Control and implemented as a Gazebo physics-engine plugin. The vessel of record is the Common Unmanned Surface Vessel (CUSV), a 12-metre, 33-tonne catamaran serving as a representative platform.
Surface-vessel models are traditionally split in two: manoeuvring models cover surge, sway and yaw; seakeeping models cover heave, roll and pitch. For autonomy work that split is awkward. A controller that only sees manoeuvring degrees of freedom cannot exercise the perception stack against the same waves that move the boat. The note documents a single parameter set that does both.
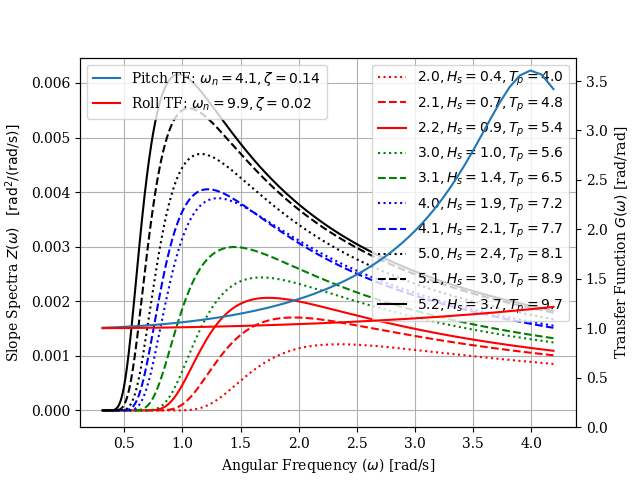
The hydrodynamic derivatives come from where the literature has the strongest theoretical or empirical support: Sarda et al. for the manoeuvring-plane added masses, Greenhow & Lin for the partially-submerged-cylinder seakeeping terms, Holtrop’s method and ITTC-1957 for drag, with the seakeeping coefficients then sanity-checked against step-response tests of the time-domain implementation (logarithmic-decrement identification of a second-order transfer function in heave, pitch and roll). The resulting frequency-domain model lets the simulator drive vessel motion directly from a chosen wave-height spectrum — see the wave-slope-vs-pitch/roll figure above.
I am releasing this for two reasons. The first is utility: this parameterisation underpinned the CUSV branch of the WAM-V Gazebo plugin used in Virtual RobotX (VRX), and it is the kind of artefact other robotics groups end up reconstructing from Fossen’s text and half a dozen papers. Having a worked example that names the chosen references and shows the resulting numbers is useful when you are trying to do the same job for a different hull. The second reason is pedagogical: the note is a compact tour of the steps a graduate student needs to take to go from “we want to simulate a boat” to “we have hydrodynamic derivatives the physics engine can integrate”. It is not a complete textbook; it is a worked example with citations back to the literature for the parts that are.
The audience, then, is engineers and graduate students building or calibrating surface-vessel simulators — particularly those using Gazebo or Ignition, or any environment where the model has to be parameterised explicitly rather than absorbed from a vendor’s CAD package.
The technical content is unchanged from the original draft of 1 October 2020. The release version cleans up the LaTeX preamble, self-contains the bibliography, and adds a provenance footnote. The Zenodo deposit (DOI to follow) dates the release, not the science.
Citation
@online{bingham2026,
author = {Bingham, Brian and Bingham, Brian},
title = {A Unified {six-DoF} Model for the {CUSV}},
date = {2026-05-03},
url = {https://carrel.bbingham.dev/posts/usv-control/cusv-model/},
langid = {en}
}